The relentless pursuit of flawless precision in robotic machining often leads manufacturers down a path where mechanical capability alone proves insufficient to overcome the dynamic challenges of the modern factory floor. While industrial robots promise speed and repeatability, they frequently encounter a triad of obstacles: a shrinking pool of skilled programmers, persistent inconsistencies in part geometry, and the unending demand to elevate product quality. Unlocking a robot’s full potential requires a paradigm shift away from viewing it as a standalone tool and toward embracing it as the centerpiece of an intelligent, adaptive ecosystem. A recent project by the Brazilian innovator Robotecki demonstrates that the true key is a holistic synergy between advanced hardware and a powerful software core, a combination that transforms the robot into a data-driven machining center capable of unprecedented accuracy and flexibility. This approach addresses foundational industry problems by creating a system that can see, think, and adapt to real-world variability.
Navigating the Complexities of Modern Manufacturing
At the heart of many contemporary production challenges lies a critical dependency on specialized human labor, a resource that is becoming increasingly scarce. The intricate tasks of cutting and drilling have traditionally relied on the expertise of seasoned machinists, creating a significant bottleneck when skilled operators are in short supply. This reliance not only inflates labor costs but also makes it exceedingly difficult for companies to scale operations or maintain consistent output. The manual nature of these processes introduces another layer of unpredictability, as human error and fatigue can lead to fluctuations in product quality and unreliable production rates. Manufacturers find themselves caught in a constant struggle to balance speed with precision, a challenge that rigid automation has historically failed to resolve. This fundamental dilemma highlights the urgent need for a more robust and autonomous solution that can deliver consistent, high-quality results without being entirely dependent on a limited workforce.
Compounding these operational issues is a formidable technical hurdle: high part variability. In many advanced manufacturing sectors, particularly those dealing with thermoformed components or fiberglass, parts are not perfectly uniform. Each piece can exhibit subtle but significant geometric differences, rendering a one-size-fits-all robotic program completely ineffective. Attempting to apply a fixed set of commands to a variable part often results in machining errors, costly material waste, and a failure to meet stringent tolerance requirements. This problem directly challenges the core principle of traditional automation, which thrives on repetition and standardization. The solution demanded a system with the intelligence to perceive the unique characteristics of each individual workpiece and dynamically adjust its actions accordingly. This need for adaptive manufacturing is not just about improving efficiency; it is a critical step toward more sustainable and cost-effective production in an era of increasing customization and complexity.
A Synergy of Adaptive Hardware and Intelligent Software
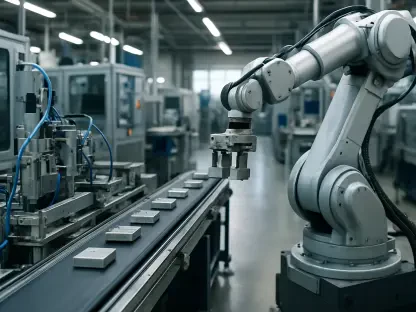
To conquer this multifaceted problem, Robotecki engineered a comprehensive robotic cell where specialized hardware and intelligent software function as a single, cohesive unit. The physical architecture of the solution is built around a high-performance industrial robot armed with custom-designed end-of-arm-tooling (EOAT). These specialized end effectors, one for drilling and another for cutting, were meticulously crafted to meet the specific demands of the materials and precision requirements. To maximize autonomy and eliminate downtime between processes, the cell incorporates an automated tool-changing system, allowing the robot to swap its tooling on the fly without any manual intervention. The most critical hardware element, however, is the system’s high-fidelity 3D scanner. This device serves as the cell’s “eyes,” capturing a precise digital map of each unique part’s geometry before any machining begins, providing the foundational data for an adaptive workflow.
This sophisticated hardware array is orchestrated by a powerful and deeply integrated software stack. The process begins when the 3D scanner creates a detailed digital replica of the physical part, capturing all its unique variations. This 3D model is then imported into Autodesk Fusion 360, a leading CAD/CAM platform, where engineers generate the precise toolpaths required for the cutting and drilling operations. The crucial link in this chain is the seamless transfer of these paths to RoboDK, the software that serves as the central nervous system for the entire operation. Within RoboDK’s environment, the entire machining sequence is simulated, optimized, and validated. A dedicated plugin for Fusion 360 streamlines this workflow, creating a direct and efficient bridge between the path creation environment and the robot programming platform, ultimately enabling the system to translate a digital plan into precise physical action.
The Transformative Power of Virtual Prototyping
The pivotal element in the project’s success was the extensive use of simulation and offline programming (OLP). By creating a complete “digital twin” of the robotic cell within RoboDK, the engineering team was able to meticulously develop, test, and perfect the entire machining process in a virtual space before the physical robot ever moved. This OLP capability was indispensable for refining the complex toolpaths required for high-precision work. It allowed programmers to experiment with different approaches, optimize the robot’s movements to avoid potential issues like singularities or axis limits, and verify the accuracy of the program with absolute certainty. This virtual validation process effectively eliminated the costly and time-consuming trial-and-error phase on the shop floor, preventing potential collisions, reducing material waste during setup, and ensuring the program was perfect from the very first run. This simulation-first strategy represents a fundamental shift in how robotic applications are developed and deployed.
This advanced software-driven approach also served to dramatically accelerate the entire project lifecycle, from initial concept to final deployment on the factory floor. Traditional robot programming, which often involves manually “teaching” the robot points one by one with a handheld pendant, is a slow and laborious process, especially for complex paths. In contrast, OLP allowed engineers to program intricate machining operations quickly and intuitively using a graphical interface. Furthermore, the software greatly simplified the complex task of system calibration. It provided the tools necessary to ensure that the virtual model in the simulation was a perfect, one-to-one match for the real-world robotic cell and its tooling. This precise calibration was the key to ensuring that the optimized movements from the virtual world translated into tangible, high-precision results in the physical world, bridging the gap between digital design and flawless execution with unmatched consistency.
Redefining Production and Paving a Path Forward
The successful implementation of this intelligent robotic cell delivered immediate and measurable improvements to the manufacturing operation. It effectively automated the critical cutting and drilling tasks, which directly mitigated the challenges posed by labor shortages and allowed skilled human workers to be reallocated to more complex, value-added responsibilities that require human ingenuity. By leveraging 3D scanning to adapt its toolpaths to the unique geometry of every single part, the system achieved a level of precision and consistency that was simply unattainable through manual methods, leading to a marked and sustained improvement in the overall quality of the final products. The combination of complete automation, optimized robot paths, and on-the-fly tool changes also resulted in significantly faster cycle times, which in turn drove a substantial increase in production throughput. The project proved that an adaptive, software-driven approach was the definitive key to unlocking high-precision machining for even the most challenging materials.