Kwame Zaire has spent his career at the intersection of heavy machinery and cutting-edge electronics, steering production lines toward a future defined by autonomous precision. As a manufacturing expert and thought leader in predictive maintenance, Kwame possesses a deep understanding of how physical hardware must harmonize with digital intelligence to ensure safety and quality on the factory floor. With NVIDIA’s release of Cosmos 3, the conversation around “Physical AI” has shifted from theoretical simulation to immediate, real-world application. Kwame joins us to explore how this new architecture is set to transform the way robots perceive, plan, and execute tasks in the chaotic environments of modern industry.
The following discussion explores the emergence of the “omnimodel” and its capacity to process multimodal data—ranging from ambient sound to spatial-temporal relationships—into actionable movement. We delve into the technical bridge between reasoning and generation transformers, the critical shift from simulation to reality, and the massive scaling of industrial robotics projected over the next few years. Kwame also sheds light on how synthetic data generation and global collaborations are accelerating the development of autonomous vehicles and smart factory agents.
How does the mixture-of-transformers architecture specifically bridge the gap between abstract reasoning and physical action?
The beauty of the Cosmos 3 architecture lies in its dual-core approach, which pairs a reasoning transformer with an expert generation transformer to handle the complexities of the physical world. In a typical manufacturing setting, a robot doesn’t just need to identify a part; it must understand the spatial-temporal relationships and the physics of how that part moves when touched. By integrating these two transformers, the system can predict action trajectories with high physics accuracy before a single motor even turns. This native understanding of images, video, and even ambient sound allows the AI to “feel” the environment, reducing the training time that used to bog down deployment. It turns what was once a series of disjointed commands into a fluid, reasoned response that mimics human-like awareness.
With industry analysts suggesting that robotics is finally ready to move from simulation to reality, how does this platform help a robot navigate a dynamic and unpredictable warehouse?
For years, we struggled with the “sim-to-real” gap, where a robot that performed perfectly in a digital vacuum would freeze when faced with the flickering lights or moving forklifts of a real warehouse. Cosmos 3 tackles this by serving as a world model that simulates physical environments and predicts future states, allowing developers to generate massive amounts of synthetic data and scene variations. This means a robot can experience thousands of “what-if” scenarios—like a person walking into its path or a pallet tipping over—before it ever encounters them on the floor. By using these foundation models as a backbone, robots can generalize their behavior across fragmented simulation stacks, making them adaptable enough to handle dexterous manipulation tasks in settings that are never truly “clean” or predictable.
Industrial robot installations are expected to reach a staggering 5.5 million globally by 2026, so how do specialized foundation models change the safety and quality stakes for manufacturers?
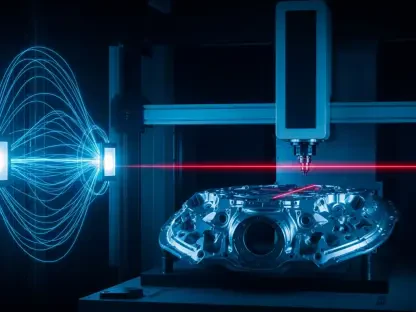
When you scale to 5.5 million units, you can no longer rely on manual programming for every edge case; you need a system that understands the inherent physics of the workspace. The inclusion of specialized datasets for warehouse safety and human motion within the Cosmos platform allows these machines to operate alongside people with a much higher degree of nuance. We are seeing tools like defect-image generation and neural scene reconstruction being used to heighten quality control, where the AI can “see” a flaw that a human eye might miss after eight hours on a shift. It’s about more than just speed; it’s about creating a vision AI agent that can perceive, plan, and act with a level of reliability that protects both the equipment and the human operators.
The formation of the Cosmos Coalition suggests a move toward “open world models,” but how does this collaborative approach impact the competitive landscape for companies building autonomous systems?
NVIDIA’s decision to build an open coalition with partners like Samsung, LG Electronics, and Skild AI represents a “generational leap” because it democratizes the core intelligence needed for physical AI. Instead of every company trying to build a world model from scratch, they can contribute to and build upon a shared foundation that understands the fundamental laws of physics. This accelerates the “Big Bang” of physical AI that Jensen Huang mentioned, allowing even smaller developers to build sophisticated autonomous vehicles or vision agents for smart spaces. It shifts the competition away from who has the most data and toward who can best apply these omnimodels to specific, embodiment-centric behaviors like pick-and-place or complex assembly.
What is your forecast for the adoption of physical AI in heavy industry?
I believe we are entering an era where the line between the digital twin and the physical machine will completely vanish. By 2026, the 5.5 million industrial robots we expect to see will not just be “programmed” machines; they will be autonomous agents capable of post-training refinement through real-world interaction. We will see a massive surge in “dexterous manipulation” capabilities, where robots handle soft or irregular materials with the same ease they currently handle steel. The successful companies will be those that embrace these open foundation models early, moving away from rigid automation and toward a flexible, AI-driven production line that can pivot as fast as the market demands.